GEBCO-NF Alumni
About Us
The GEBCO-Nippon Foundation Alumni Team is an international team led by alumni of the Nippon Foundation / GEBCO training program in Ocean Mapping at the Center for Coastal and Ocean Mapping / Joint Hydrographic Center of the University of New Hampshire. The training program has been running since 2004 and there are currently 90 alumni from 40 different countries. The Team also includes selected GEBCO and industry-expert partners. The alumni work with mentors, advisors and contributors from industry, research and government organizations worldwide. The Team is characterized by its diversity, from its global distribution, to diverse backgrounds ranging from ocean mapping, hydrography, geology, engineering, boat design, software development, physics and computer science that includes representatives of academic institutions, national hydrographic offices, industry and non-profit organizations.
Our Team approach to the Ocean Discovery challenge is that all the required technology elements such as multibeam sonars, underwater navigation, autonomous undersea vehicles, unmanned surface vessels, data transfer systems, remote control systems, and data processing are currently available. The aim of the GEBCO-NF Alumni Team is to leverage existing technology, wherever possible, and to integrate it to achieve the competition requirements. Our strategic approach is to augment the hardware, integration and software needs of the Team by developing strong partnerships with technology and service providers.
TECH INFORMATION
The technology plan for the Team includes three core fundamental components.
- Surface Vessel
- Underwater Vehicle
- Communications & Data Processing Framework
Each of these components may not initially appear transformative for autonomous and uncrewed ocean floor mapping. However, when used in conjunction with each other, and with some strategic innovations, a unique solution emerges that uses proven approaches for bathymetric surveying. It is the interface between the technologies, the newly designed innovative surface vessel and the holistic manner in how they all work together that makes this solution not only unique, but commercially viable and serving the needs of ocean industries. The AUV-USV concept was conceived as a means to map the seafloor for longer time periods in a wide variety of ocean environments without direct intervention. The AUV-USV concept will lead to more efficient, safer and cost-effective seafloor mapping operations. In conjunction with the surveying technology, the Team developed a work flow that utilized both automated and remote processing, using a cloud-based hosting environment, to maximize access to data and a web services approach for rapid and efficient access to new sea-floor information.
TEAM LEADS
The team leads worked to coordinate and manage the GEBCO-NF Alumni team members, advisors and business partners and suppliers from across various continents and time zones for the joint goal of mapping the sea floor and to successfully meet the challenge set out by the Shell Ocean Discovery XPRIZE.
Dr. Rochelle Wigley received her PhD in Geological Sciences in 2005, where her studies focused on sediment chemistry for marine sequence stratigraphic studies of condensed sediment records. She is currently Project Director for all Nippon Foundation / GEBCO projects at the University of New Hampshire, including the Training Program and the Indian Ocean Bathymetric Compilation project.
Dr. Yulia Zarayskaya received her PhD in Geology from the Geological Institute of Russian Academy of Science where she worked geomorphological analysis of slowing spreading ridges to aid understanding the seismicity and neotectonic structure in the Fram Strait.
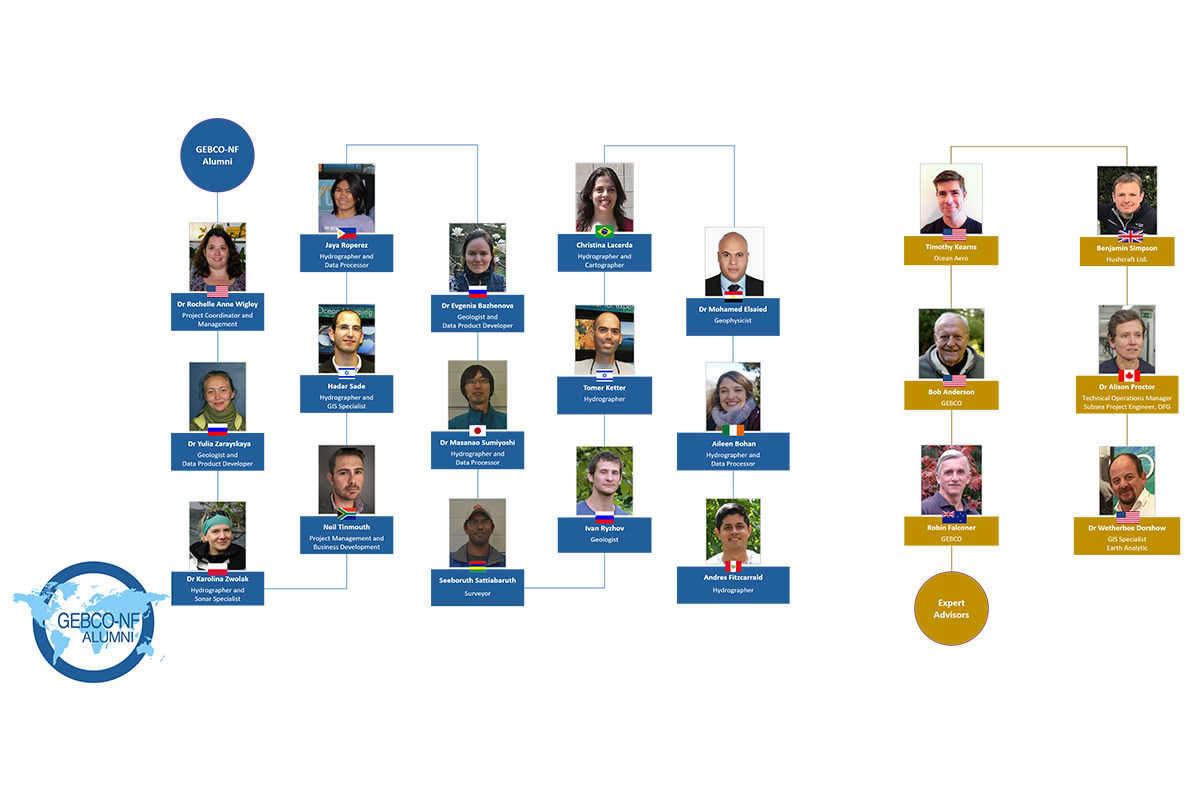
TEAM MEMBERS
| Rochelle Wrigley | South Africa/USA |
| Yulia Zarayskaya | Russia |
| Evgenia Bazhenova | Russia |
| Jaya Roperez | Philippines |
| Karolina Zwolak | Poland |
| Seeboruth Sattiabaruth | Mauritius |
| Masanao Sumiyoshi | Japan |
| Aileen Bohan | Ireland |
| Tomer Ketter | Israel |
| Hadar Sade | Israel |
| Neil Tinmouth | South Africa/UK |
| Ivan Ryzhov | Russia |
| Christina Lacerda | Brazil |
| Andres Fitzcarrald | Peru |
| Mohamed Elsaied | Egypt |
| Azmi Rosedee | Malaysia |
ADVISORS
| Robin Falconer | New Zealand |
| Bob Anderson | USA |
| Tim Kearns | Canada |
| Wetherbee Dorshow | USA |
| Ben Simpson | UK |
| Alison Proctor | Canada |